 去无方向的信 - 3个参数
去无方向的信 - 3个参数
# 3个参数
暴力限定了一下光圈、快门和 ISO 的档位,最终得到了六大档光圈、六大档快门和六大档 ISO。之所以管他们叫“大档”,是因为这是我从机械相机上移植过来的概念。
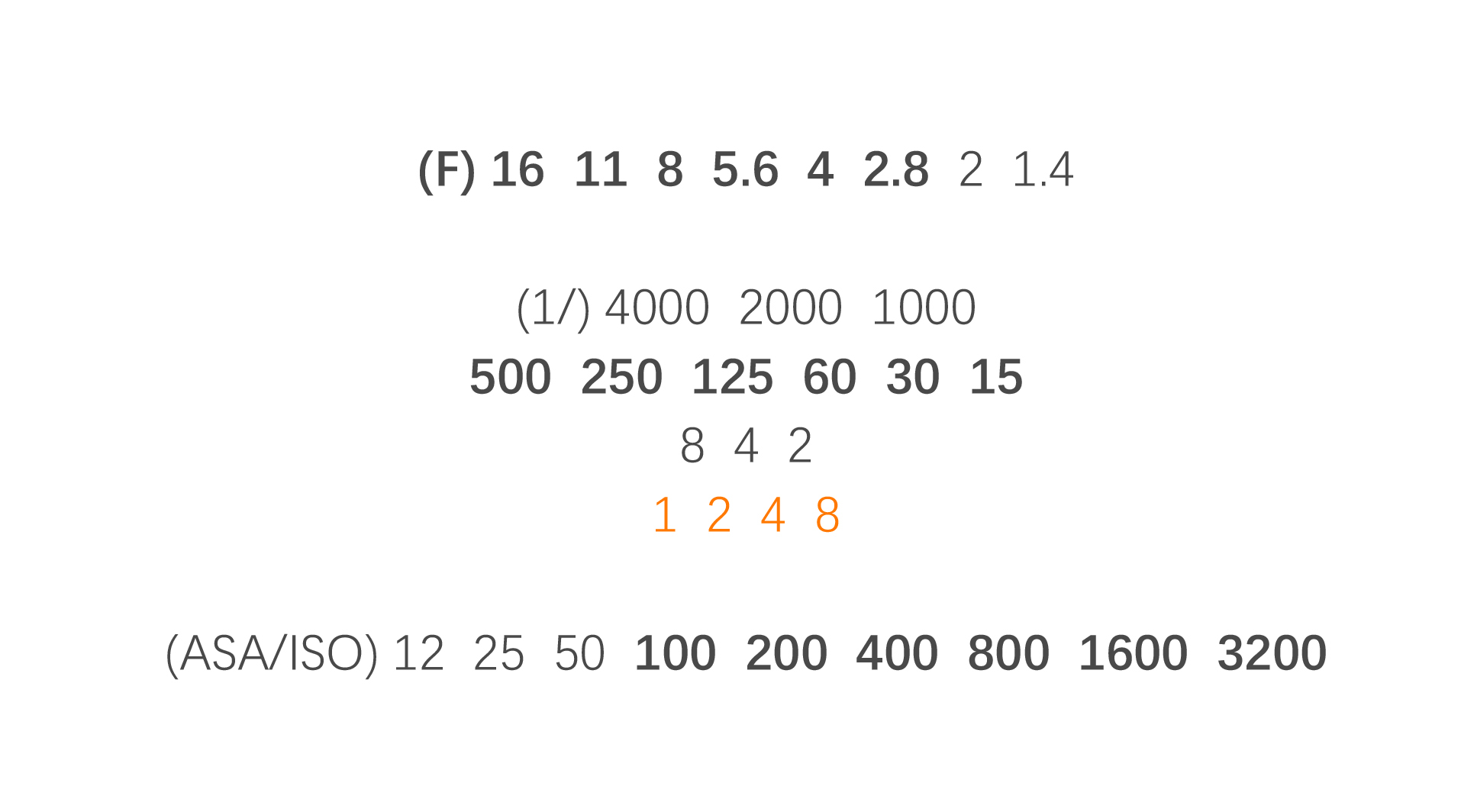
单看光圈,数字越小,光圈越大;光圈越大,相机里的进光量越多;进光量越多,照片儿就会越亮。
单看快门,数字越小,快门速度越慢(因为是 1/n 秒,所以 n 越大,数值越小);快门速度越慢,感光元件受光时间越长;受光时间越长,照片儿就会越亮。
单看 ISO,数字越大,感光度越高;感光度越高,感光元件的感光能力越强;感光能力越强,照片儿就会越亮。
单看标粗的这六大档光圈,每相邻的两档之间,相差一档曝光,比如:F16 比 F11 小一档曝光。
单看标粗的这六大档快门,每相邻的两档之间,相差一档曝光,比如:1/250s 比 1/125s 小一档曝光。
单看标粗的这六大档 ISO,每相邻的两档之间,相差一档曝光,比如:800 比 1600 小一档曝光。
而“一档曝光”,我们可以叫它“1 eV”。

这张照片儿的参数是:[1/125s F8 ISO200],但这并不意味着,如果我想拍出这个亮度,我只能用 [1/125s F8 ISO200] 这组参数。
我还可以保证快门速度不变,只动光圈和 ISO: [1/125s F5.6 ISO100] 或 [1/125s F11 ISO400] 或 [1/125s F16 ISO800]
我还可以保证光圈大小不变,只动快门和 ISO: [1/250s F5.6 ISO200] 或 [1/500s F4 ISO200] 或 [1/1000s F2.8 ISO200]
甚至三个参数都有所变化也没问题。
如果我们把标准曝光值暂且定为“0”,标准曝光值就是能拍出正常亮度的照片儿的意思,那标准的曝光公式基本可以理解为是“0+0+0=0”:等号前面的三个“0”分别是快门、光圈和 ISO,等号后面的“0”代表标准曝光值。
如果正常的曝光参数原本是 [0 0 0],但现在我需要加快一档快门速度,于是,从曝光的角度来说,就变成了 “-1 + 0 + 0 = -1”,这意味着受快门速度影响,曝光减小了一档 (-1 eV),所以为了把减小的那一档曝光补回来:
我们要不然就增大一档光圈,变成 [-1 +1 0];要不然就增大一档 ISO,变成 [-1 0 +1];或者减小一档光圈,但增大两档 ISO,变成 [-1 -1 +2];甚至可以增大四档光圈,但减小三档 ISO,变成 [-1 +4 -3]。
总之,就是要变成三个参数的档位加起来归零的状态。
所以现在问题就来了,如果这么多种组合都可以拍出同样的曝光效果,那是不是随便选一组就可以哐哐拍了呢?就像我上次说过的,随便选出一档光圈,随便选出一档快门,再随便选出一档 ISO,只要保证他们组合在一起曝光正常就可以了,不是么?
不是。
对于上面那张照片儿, [1/125s F8 ISO200] 和 [1/15s F16 ISO100] 的曝光效果是一样的,也就是说,用这两组参数可以拍出两张曝光完全一样的照片儿。但是,我只能选前者,不能选后者。
[1/125s F8 ISO200] 和 [1/250s F8 ISO400] 的曝光效果是一样的,我拍的时候选了前者,但现在如果让我再重拍这张照片儿,我会选后者。
所以,就又回到了那个问题:真的是随便选么?如果不是,怎么选?怎么选是对的?怎么选才是最好的?

你现在已经知道“不同的曝光参数组合可以拍出曝光一致的照片儿”了,所以,为什么我们还要那么事儿事儿地特定住某一档光圈,特定住某一档快门,特定住某一档 ISO 呢?
因为,这三个参数的共同点是都可以影响曝光,但他们除了都能影响曝光之外,还各有各的“副作用”。
首先,光圈:
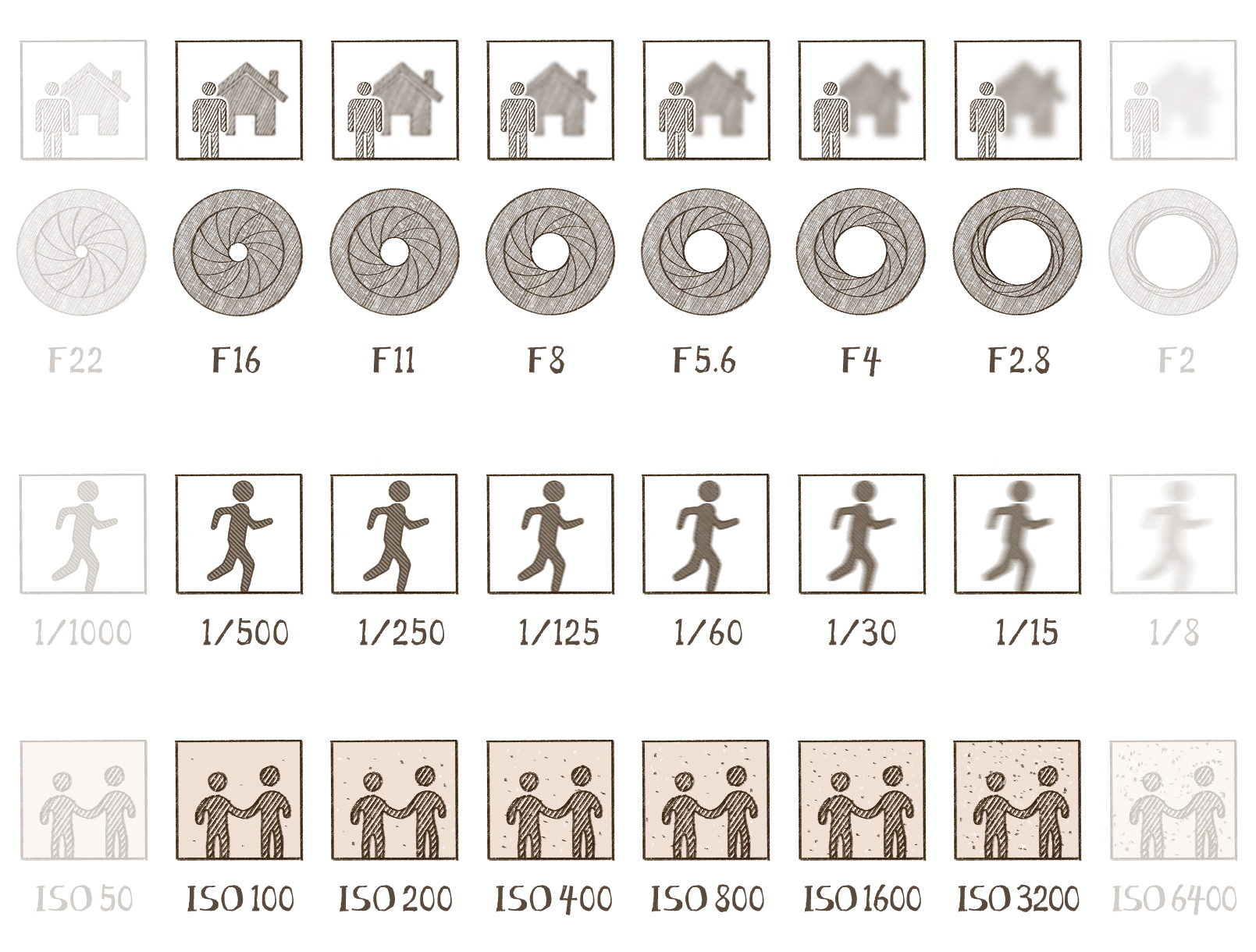
我们知道,如果快门和 ISO 不变,光圈越大,相机里的进光量就越多,照片也就会越亮,反之亦然。但我们现在还应该知道,光圈越大,景深越浅,也就是我们常说的“虚化越强”,而光圈越小,景深越深。景深如果足够深,甚至可以做到让一张照片儿从前到后一览无余,一点虚化都没有。
再来,快门:
我们知道,如果光圈和 ISO 不变,快门越慢,感光元件的受光时间就越长,照片也就会越亮,反之亦然。但我们现在还应该知道,快门越快,越能够定格住一个瞬间,尤其是抓拍一些动态的画面,可以尽可能地不糊片儿,而快门越慢,越容易糊掉。但这当然也不是说快就好,慢就不好,而是快和慢各有各的好,因为有的时候,很可能我们就是需要让一些东西糊掉。
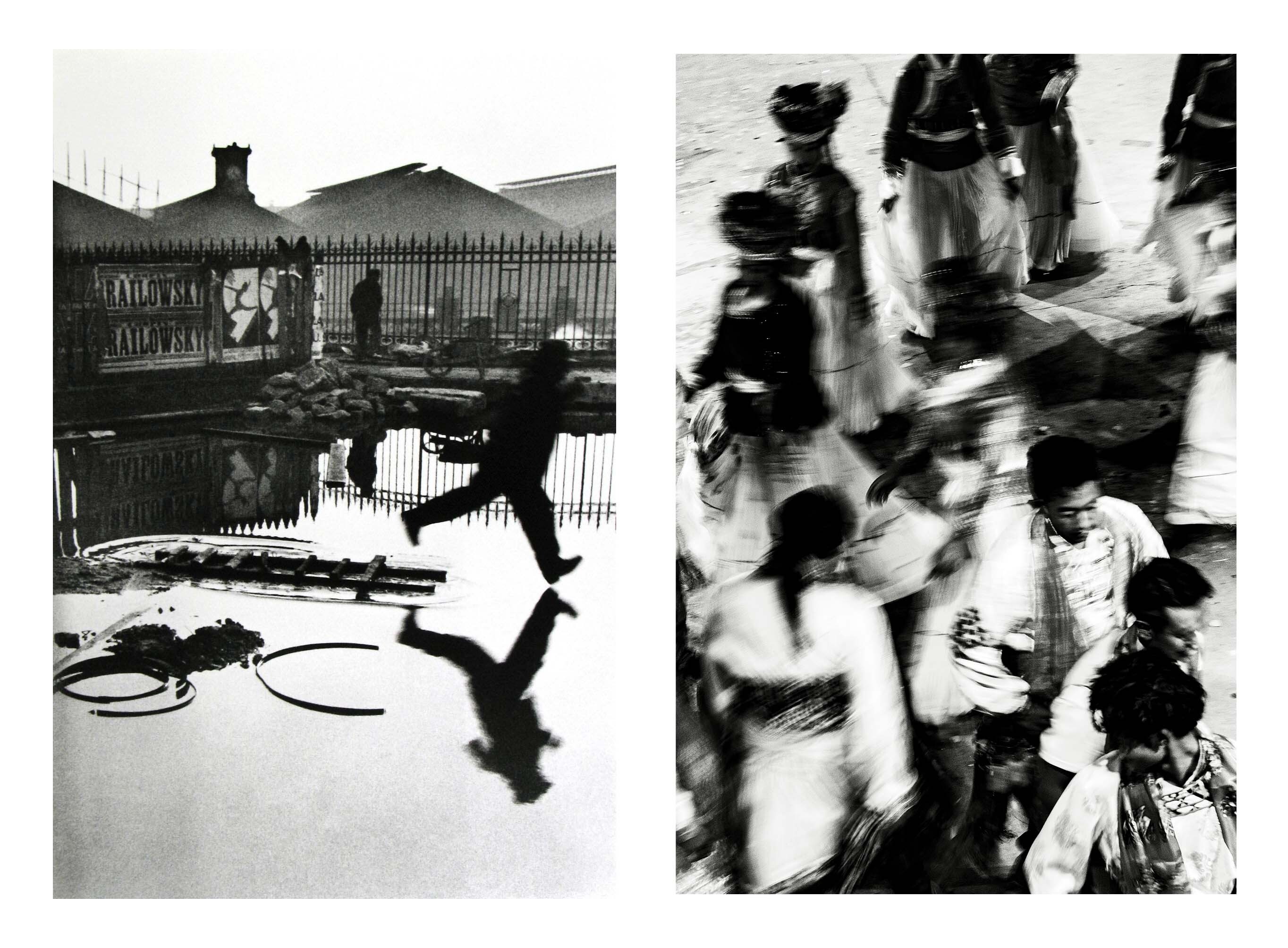
左:Henri Cartier-Bresson;右:Mai
最后,ISO:
我们知道,如果光圈和快门不变,ISO 越高,感光元件的感光能力就越强,照片也就会越亮,反之亦然。
但我们现在还应该知道,ISO 越高,画面的纯净度就越低,就越容易出现噪点这个东西(白噪点其实还好,关键是现在数码相机的彩色噪点太要命了),而 ISO 越低,画面的纯净度就越高,就越容易拍出一些更细腻的画面。

所以,**特定的光圈要的是特定的景深,特定的快门要的是特定的速度,特定的 ISO 要的是尽可能高或尽可能低的画质……**你没有看错,很偶尔的时候,我们可能会需要尽可能低的画质。
所以,现在可以说回这张照片儿了(这张照片儿的参数是 [1/125s F8 ISO200]):

我可不可以用 [1/30s F16 ISO200]?可以,虽然光圈减小了两档,但快门放慢了两档,所以曝光情况没有变,但**“副作用”明显**:ISO 没有变化,光圈从 F8 变成了 F16,在这种距离下,景深其实没什么太大变化,都是全景深,但快门从 1/125s 变成了 1/30s。我当时在达祖小学里溜达,随时要拍跑来跑去的孩子,1/125s 还基本能应付,但 1/30s 就比较捉急了。
那我可不可以用 [1/1000s F2.8 ISO200]?可以,虽然快门加快了三档,但光圈也增大了三档,所以曝光情况没有变,但“副作用”明显:ISO 没有变化,快门从 1/125s 变成了 1/1000s,足够快,孩子们变成疯狗我都不怕拍糊了,但光圈从 F8 变成了 F2.8,景深大幅度收紧,孩子们前后跑来跑去的时候我很可能对不上焦,景深太浅,随便一跑就出焦了。
另外,我个人目前特别不喜欢虚化这个东西,虚化能弱一点是一点,所以,如果条件允许,通常我的光圈调得都是比较小的。
那我可不可以用 [1/2000s F16 ISO12800]?可以,曝光一致,但“副作用”明显:光圈从 F8 变成了 F16,足够的景深,快门从 1/125s 变成了 1/2000s,孩子们坐上火箭我都不怕拍糊了,但 ISO 从 200 变成了 12800,画面纯净度会大打折扣,即便后期修图的时候我再努力,也很难让这张照片儿有这种油油润润的感觉了。
所以,我认为在这个场景下, [1/125s F8 ISO200] 是最合适的曝光参数组合,次一等的选择是 [1/60s F8 ISO100] 和 [1/125s F11 ISO400]。
#
# 自动化的束缚
现在的相机,功能越来越强大,操作越来越自动化,但其实,在我看来,这些高科技,对于大多数人来说,非但不是解放,反而是束缚。
比如那些自动曝光模式:
A 档(有些相机叫 Av 档),光圈优先档,这个模式代表着你可以自己调节你需要的光圈值,但你把快门和 ISO 的选择权交给了相机。
如果是白天拍,也许还好,只是也许还好,但如果光线稍差一点点,就很容易出问题。
S 档(有些相机叫 Tv 档),快门优先档,这个模式代表着你可以自己调节你需要的快门值,但你把光圈和 ISO 的选择权交给了相机。
半 M 档(ISO 自动),这个模式代表着你可以自己调节你需要的光圈值和快门值,但你把 ISO 的选择权交给了相机。
P 档,完全自动档,这个模式代表着你不如直接用手机拍。
我们甚至都可以不用分光线是好是坏了,在我看来,以上这些自动曝光模式全都容易出问题,因为如果你的曝光模式是自动的,那很大概率你的测光模式也是自动的。
所以,接着说那些自动测光模式。
什么是自动测光?自动测光就是相机自己觉得怎么曝光合适他就怎么曝,他会给你匹配一套曝光参数,但**问题就在于:首先,通常他并不知道我到底需要什么曝光;其次,即便他蒙对了曝光,他也不知道我具体需要什么样的光圈值,什么样的快门值,什么样的 ISO 值……**因为我之前讲过,我能用好多种不同的曝光参数组合拍出曝光一致的照片儿,但不是每种组合都适用于当时当下的场景。
所以,相机的自动测光只能测出一个他觉得准确的曝光,这涉及“18% 灰”这个概念。
常见的自动测光模式有平均测光、中央重点测光和点测光,在这三种自动测光模式的基础上,现在还衍生出来好多“更精确”的自动测光模式。
聊到这儿,你可能会想到还有一个叫“曝光补偿”的东西,好像在相机测不准光的时候有用处,让我来尽可能形象地描述一下这个东西。
相机看到一个场景,他给你配了一档光圈,配了一档快门,配了一档 ISO,组合起来固定住了一个曝光值,而曝光补偿就像是你在跟相机商量,如果你觉得他把照片儿搞得太亮了,或者说你怕他把照片儿搞得太亮了,你就减一点曝光补偿,他一听你说要暗一点,他就随便缩缩光圈,或者随便催催快门,或者随便降降 ISO,于是,照片儿就比刚才暗了一点,就达到了你想要的效果。
但你想,如果我跟他商量,意味着我基本相信他的能力,稍有偏差,咱们可以商量着来,但问题是,我完全不相信他的能力,我觉得他除了麻烦事儿特别多之外什么都不会……所以,不用拿着曝光补偿跟相机商量,就直接给他下死命令,全手动,让他干嘛他干嘛就好了。
接下来就该到自动对焦模式了:
说实话,我是真懒得列举各种各样的自动对焦模式了,总之就一句话,都不好用,因为相机不会知道你的意图,而且,再快的自动对焦也没有不对焦快,有关这一点,我后面会很重点地讲。
现在的相机给我们的选择太多了,但我们都是有选择困难症的人,选择多了基本等于什么也决定不了。
**总而言之,这么说吧,在绝大多数日常拍摄的情况下,我们只有把相机里所有默认开启的“自动功能”都给关上,才有可能真的拍到一些什么,因为在我看来,那些自动功能基本真的是一个有用的都没有。**反而是专业拍摄,偶尔可以用到那些自动功能,很奇怪哈!
# 做相机的掌控者
拍照片儿看的就是谁够暴,谁的掌控力强,比如是你掌控了环境,还是环境限制了你?比如是你掌控了模特,还是模特影响了你?比如是你掌控了摄制团队,还是摄制团队胁迫了你?
比如,有这么一位摄影师,Stephen Gill,他拍摄了一个项目叫 The Pillar,他在他家旁边的空地里夯了两根木头桩子,一根桩子就是桩子本桩,另一根桩子上面架着一台改装过的相机,这台相机的快门是靠动态感应系统自动驱动的,于是就有了下面这些照片儿。

这本画册拿了法国阿尔勒奖(The Rencontres d'Arles),基本所有人都沉醉于“自然力”和“没有人类干预”这些概念上,当然这些照片儿非常好看,而且非常有意思,但真的没有人类干预么?
比如:**谁有的这个想法呢?谁夯的木桩子呢?谁架的相机呢?谁改装的快门驱动系统呢?谁挑的照片儿呢?**挑照片儿这事儿尤其关键,成册也是,这些东西咱们后面都会讲到。
所以,这组作品的摄影师绝不是放弃了掌控权,而是掌控了更难掌控的东西。我认为,Stephen Gill 掌控了一种埋藏在大家心底很久但说不清道不明的感觉,同时,他还掌控了不需要话语的话语权,所以牢牢地锁住了观众。
当然,这全都是后话,你现在连相机都还不太会用呢,所以你得努力至少先能把相机掌控住。
# 来源
- 极客时间《去无方向的信》 (opens new window)专栏笔记